
Accur8vision is een volumetrisch detectiesysteem, welke gebruik maakt van lidar technologie voor detectie. Lidar is een methode om afstanden te meten door pulserende lasers rond te schieten, waarbij het doel de lasers reflecteert. Op basis van de TOF (time of flight) wordt de afstand vervolgens gemeten. Het systeem verwerkt de positie van elke gereflecteerde puls tot 2cm nauwkeurig. In een locatiedatabase worden honderd duizenden tot miljoenen(!) locaties per seconden verwerkt, het systeem filtert deze punten vervolgens en geeft ze weer in een 3D map.
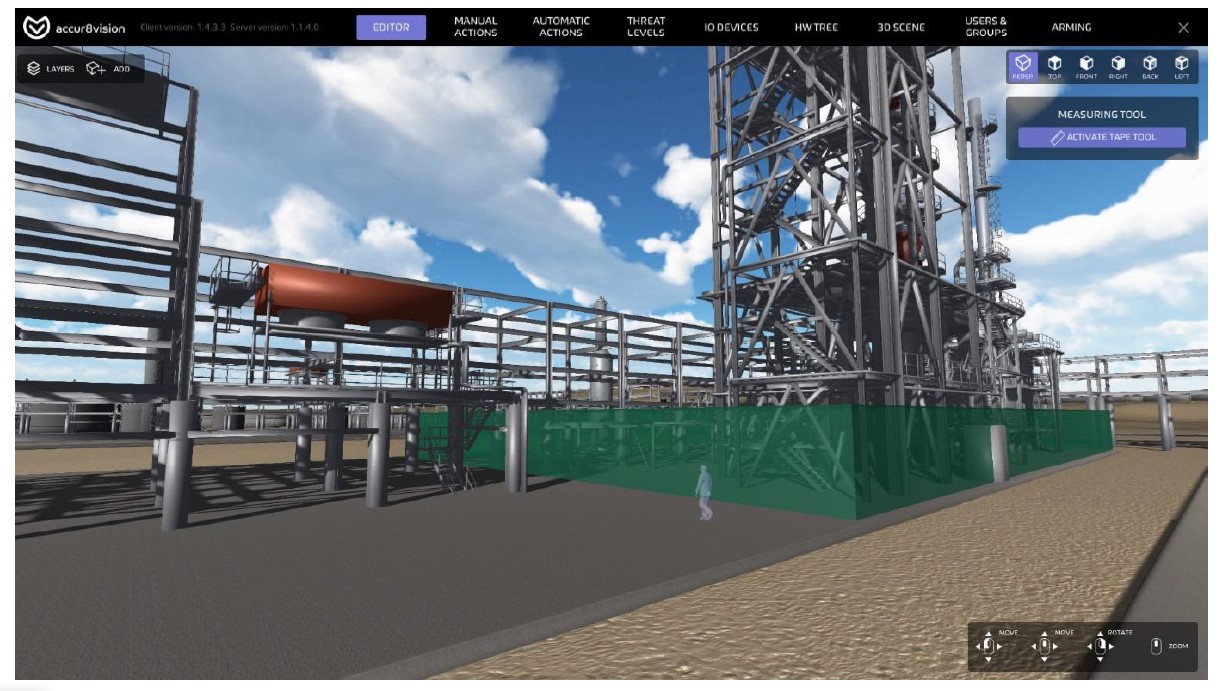
De 3D map is prettig af te lezen en kan gebruikt worden om de beveiliging te plannen. Door gebruik van fotogrammetrie wordt de 3D map op de beste manier geproduceerd. Om de omgeving samen met daken en zijkanten van de gebouwen goed in kaart te brengen, kan men het beste werken met een drone, gebruik maken van Google maps met daar overheen een fly grid. Hierdoor wordt de 3D map een exacte replica van de echte omgeving. Bij het bepalen van de beste locatie voor de componenten, kan deze 3D map functioneren als planningsomgeving, voordat er op het echte terrein getest wordt. Hierdoor kan een project veel makkelijker worden ontwikkeld door de engineers.
Als de componenten eenmaal zijn opgezet in Accur8vision en alles is geïmplementeerd, kunnen ongelimiteerd zones worden toegevoegd aan de omgeving. De zones worden gebruikt om een gebied te beveiligen en kunnen ieder gewenste maat en kleur hebben. Verschillende instellingen, prioriteiten en functies kunnen per zone gegeven worden. Als er een indringer zich in een zone bevindt, wordt het afgelegde traject, de snelheid en beweging van de indringer weergegeven. De zone geeft ook aan hoeveel indringers zich erin bevinden en hoelang deze daar al zijn. Dit is de laatst benodigde stap binnen Accur8vision.