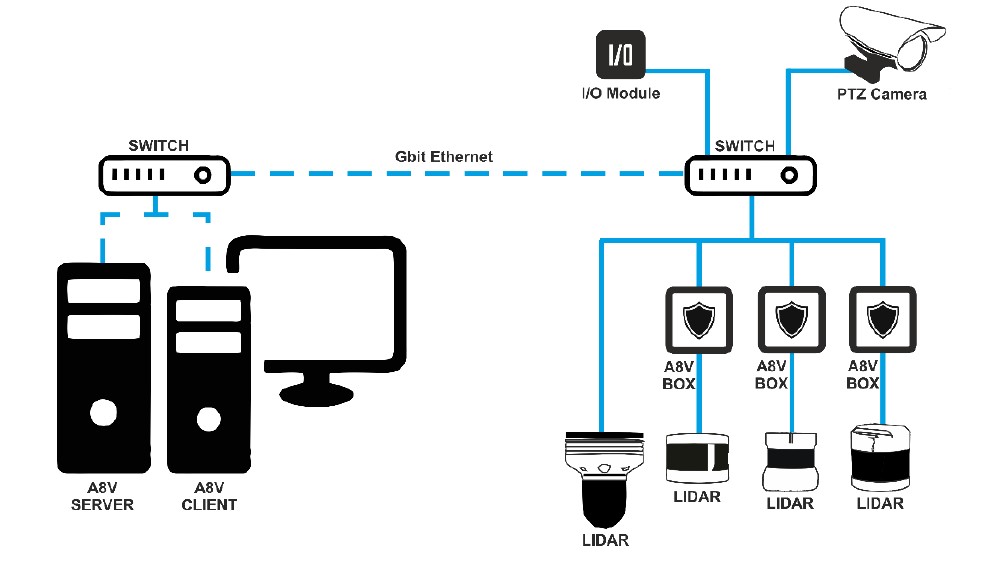
Accur8vision is een volledig IP systeem, alle componenten zijn IP gebaseerd. De lidars worden normaal gesproken verbonden met een Accur8vision box, welke zorgt voor een back-up voeding. Alle lidars, camera’s en I/O modules worden middels LAN verbonden aan een netwerk switch. De Accur8vision server en cliënt worden aan datzelfde netwerk verbonden middels LAN.
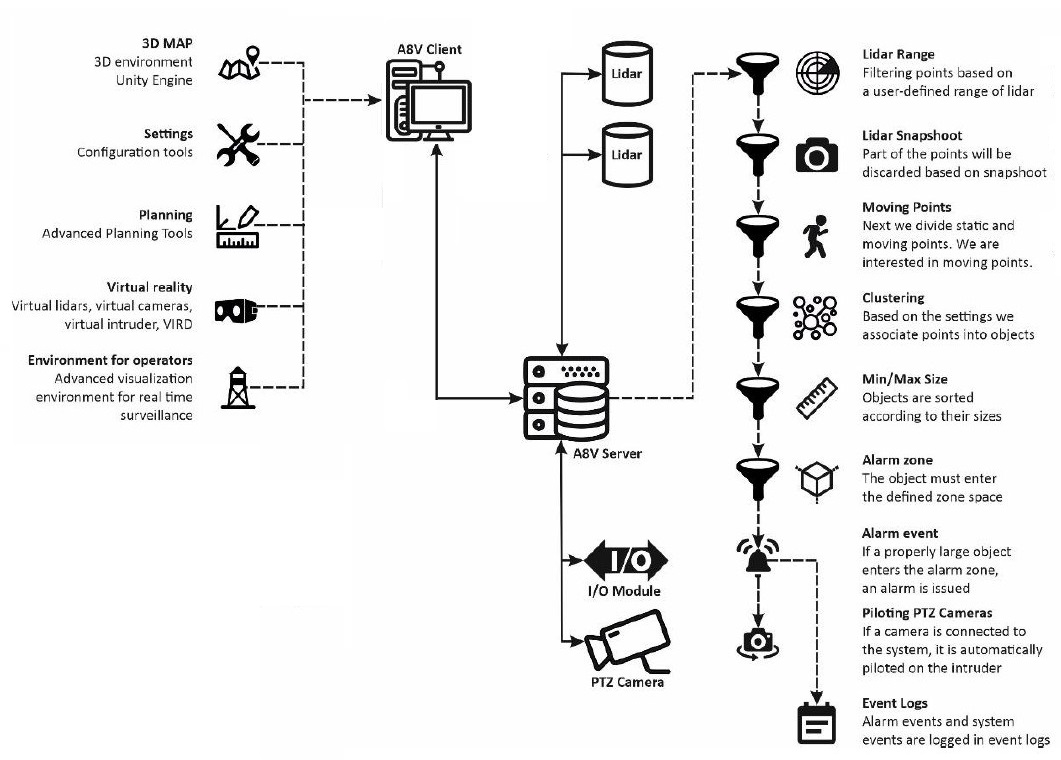
- De Accur8vision server verwerkt alléén data van aangesloten lidar detectoren
- Op de server wordt data gefilterd op gebruikersniveau van de Accur8vision configuratie, dit geldt ook voor snapshots
- Het systeem maakt onderscheid tussen statische en bewegende punten
- Gebaseerd op clusters worden de groepen in objecten omgezet. Bewegende groepen samen vormen een object welke in de Accur8vision client wordt weergeven in een box
- Alléén een object kan een alarm af laten gaan, wanneer het de alarmzone binnengaat
- Accur8vision berekent elk doorgegeven lidar punt, ongeacht welke lidar dit doorgeeft
- Lidar detectoren kunnen handmatig worden gekalibreerd in de 3D map
- De locatie van de lidars op de map wordt in de client editor aangegeven, net als het ontwerp van de alarmzones
- Een object kan een minimum en maximum grootte hebben, hierdoor kun je filteren op kleine en grote objecten
- Het traject van een object welke het alarm triggert, wordt opgeslagen in het eventlog
- De Accur8vision client visualiseert de locatie van de indringer real time. Ook wordt hierin het traject, het aantal en de snelheid van de indringer(s) weergegeven
- PTZ camera’s worden automatisch aangestuurd om de indringer(s) te volgen (als deze zijn geïnstalleerd)
- Accur8vision bevat een aantal plannings- en simulatietools